
A NoiseMap noise model supplies all the data that NoiseMap needs for noise predictions. You can think of it as a special form of digital map. The NoiseMap model must describe:
- Noise source, such as roads, vehicles, plant, railway tracks
- Transmission path, particularly noise barriers, ground topography and hard or soft ground cover
- Receiver locations
The plan view of a small noise model is shown below:

You not need to know in detail how these affect the generation and spread of noise. For example, a barrier may screen part of road from some receivers, but other receivers may have no screening. You do not need to consider this detail. You only have to make sure that you include the various objects which could affect the spread of noise, and NoiseMap will work out how these affect the noise level at any point of interest.
The 3-D view of the same model:
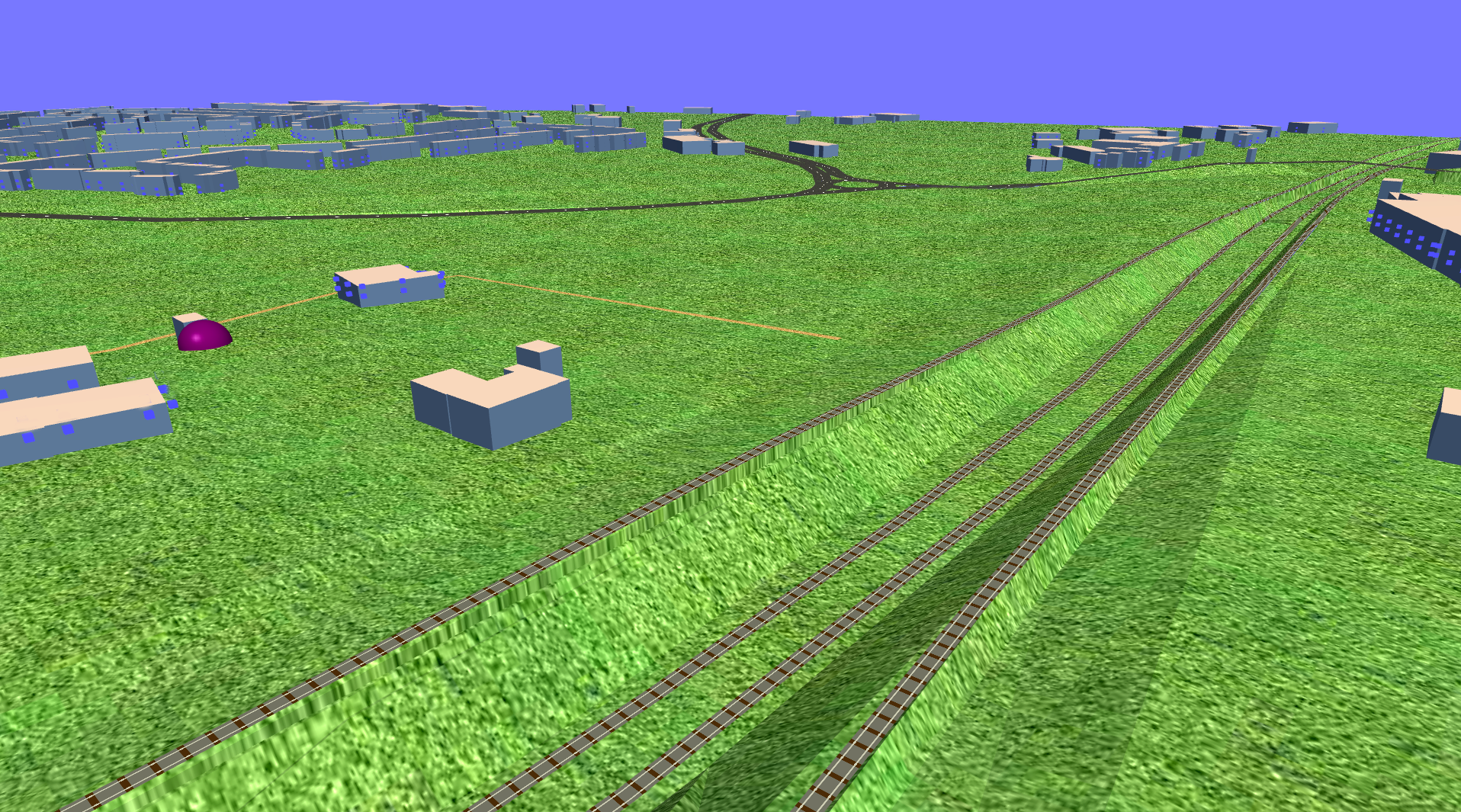
The noise model resembles the three-dimensional physical situation, but only includes the features which affect the spread of noise. These only need to be shown to a level of detail and accuracy which will give acceptable noise calculations. It is hard to visualise the 3-D nature of the model, but NoiseMap has a 3-D viewer to make this easier.
Noise contours produced by this model:
 The noise contours can be viewed on the plan of the model. These contours are for the industrial source on the left. Separate contours have been made for the road and railway.
The noise contours can be viewed on the plan of the model. These contours are for the industrial source on the left. Separate contours have been made for the road and railway.
Noise contours overlaid on the 3-D view:
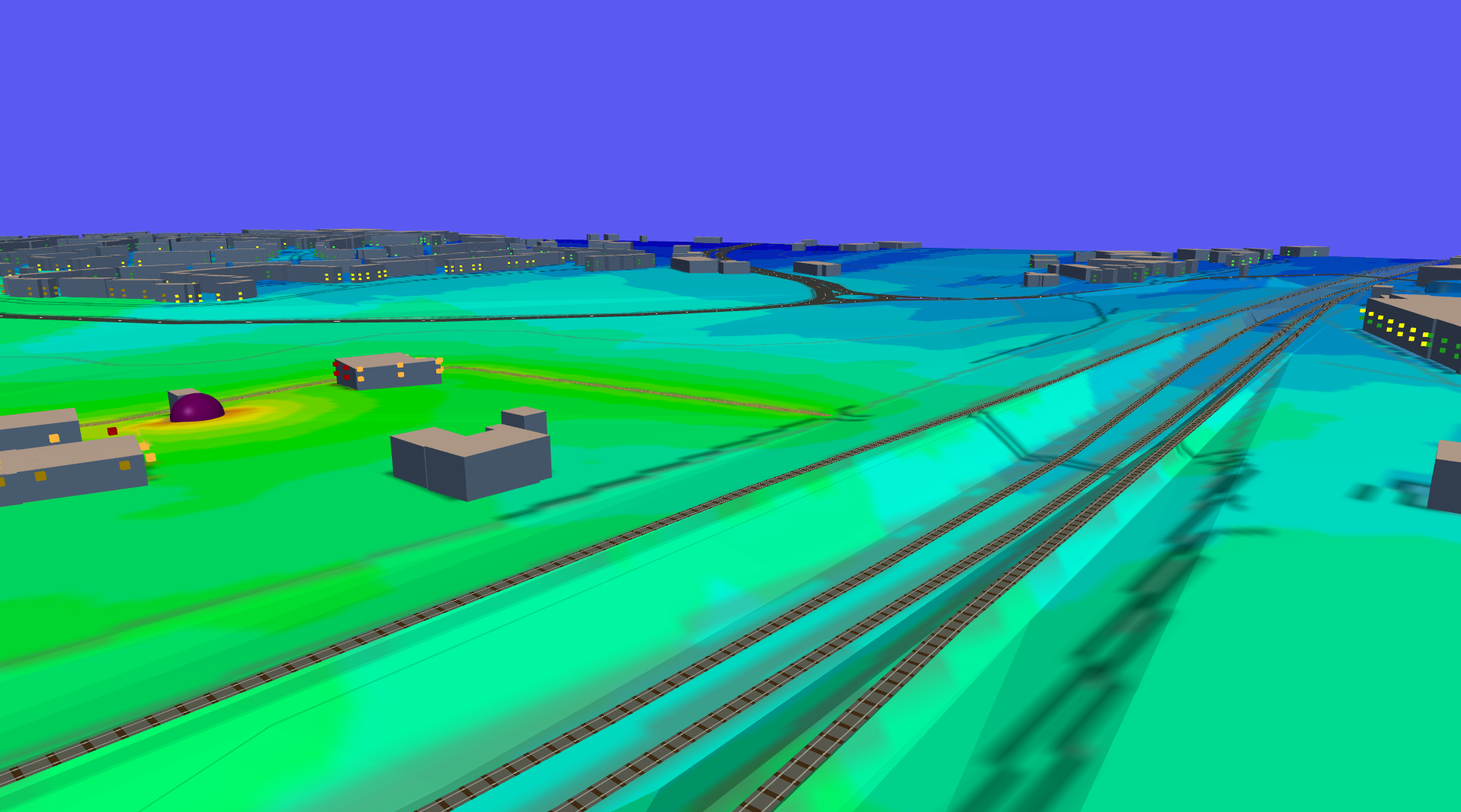 It can be much easier to understand the effects when viewed in three dimensions by overlaying the contours onto the 3-D model.
It can be much easier to understand the effects when viewed in three dimensions by overlaying the contours onto the 3-D model.